Z-axelns homing switch
Det ser ut som att det är så här den skall sitta, men då når inte pinnen till den innan kulleden går i taket.

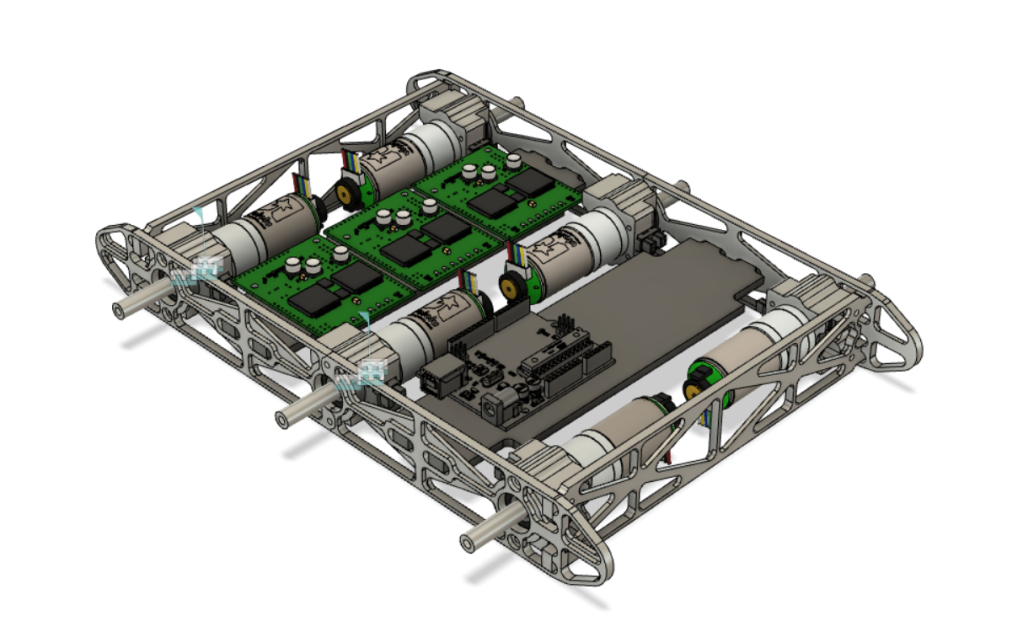
Z-motorns hål
Vad är bästa sättat att göra hålet i aluminiumchassit stort nog för motorn att gå ner? Helst skulle jag använda en liten handhållen sticksåg med metallblad. Finns det en bättre metod?

Y-axelns montering i chassit?
Jag kommer behöva montera isär och ihop både X och Y-axlarnas lagerhus för axlarna pekar ut ur fel ända inser jag nu. För åt minstonne Y-axeln så behöver jag dessutom montera isär den helt och hållet en gång till för att alls kunna gå in den.
För jag antar att det är helt orimligt att skruva av skruven på kulaxeln? Då lär alla små kulor rulla ut och vara helt omöjliga att sätta in igen?
Jag är lite orolig att axeln kommer vara svår att trä genom alla hål frå utsidan även om jag tar bort alla lager, men vi får hoppas på det bästa där.

Inga kullager för X/Y-axlarna?
Är det så att det inte är några kullager mellan de tunga metalblocken som utgör själva X/Y-axlarna? Man bara smörjer och spänner åt med skruvarna så att det blir lagom lite glapp?