
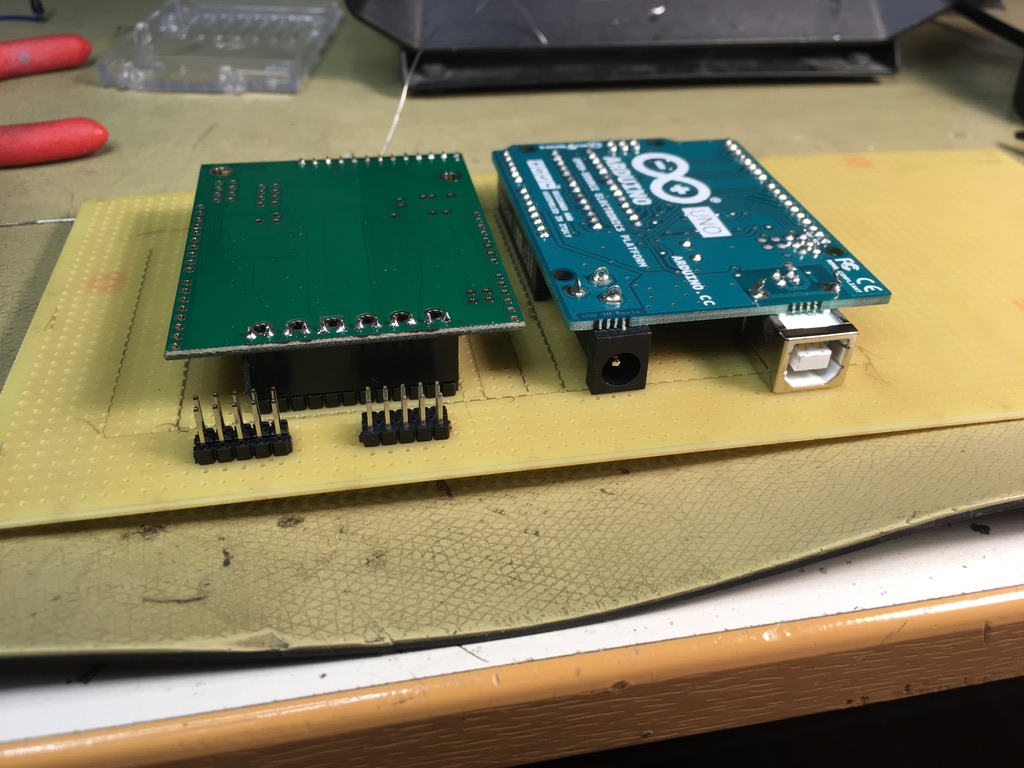
So I decided to order all of the parts needed to build the motherboard that connects all of the electronics together. Since I have most of the mechanics, putting the motherboard together will allow me to build a mostly functioning complete prototype, finally.
And here it is, well, not even close to being finished, but at least one dual motor driver and an Arduino can now be attached and removed easily. Also, pin headers for two leg joints, complete with all sensors. Now I just need to do the backplane where I connect all of the pins to each other.
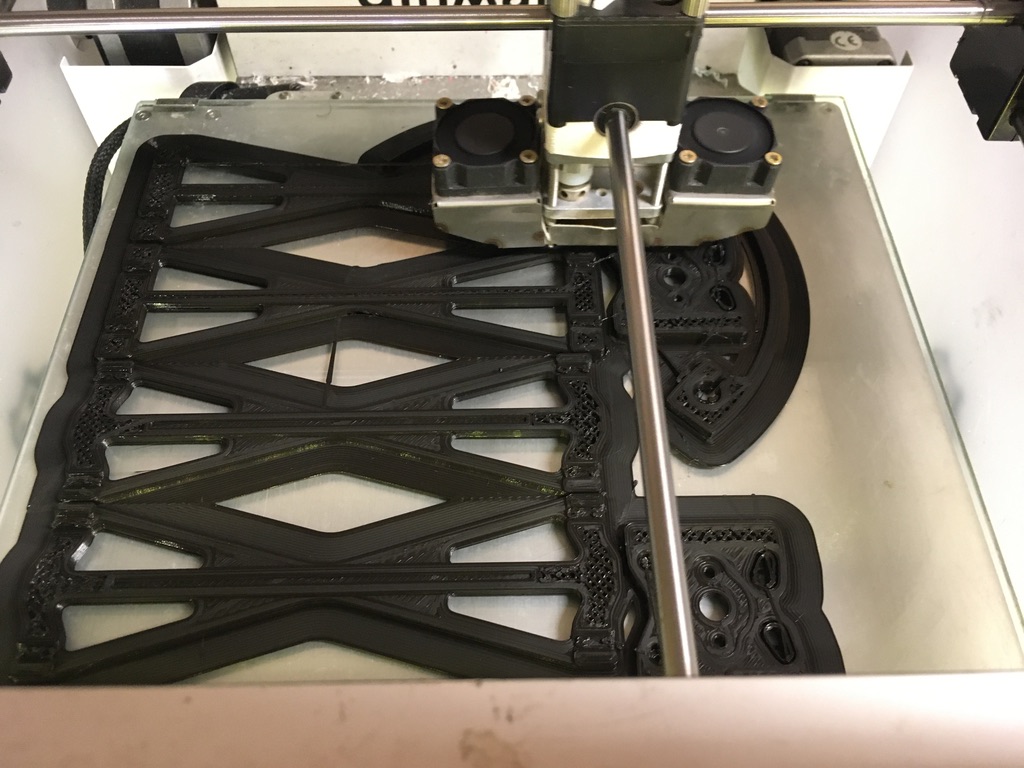
I also did some modifications to the mechanics, so here is me printing it out in a much more appropriate black PLA rather than the brittle transparent pink PLA I used before.
Unfortunately, I have also found that mu motor-axle joints are not straight enough, so the entire plastic wobbles when the axle turns, so I will need to add some give in that joint. This means I can no longer have the motor be responsible for making sure the axle does not fall out. So that means the axle joint needs to be redesigned (For like the 23rd time). Either way, pictures will arrive when I do that project.
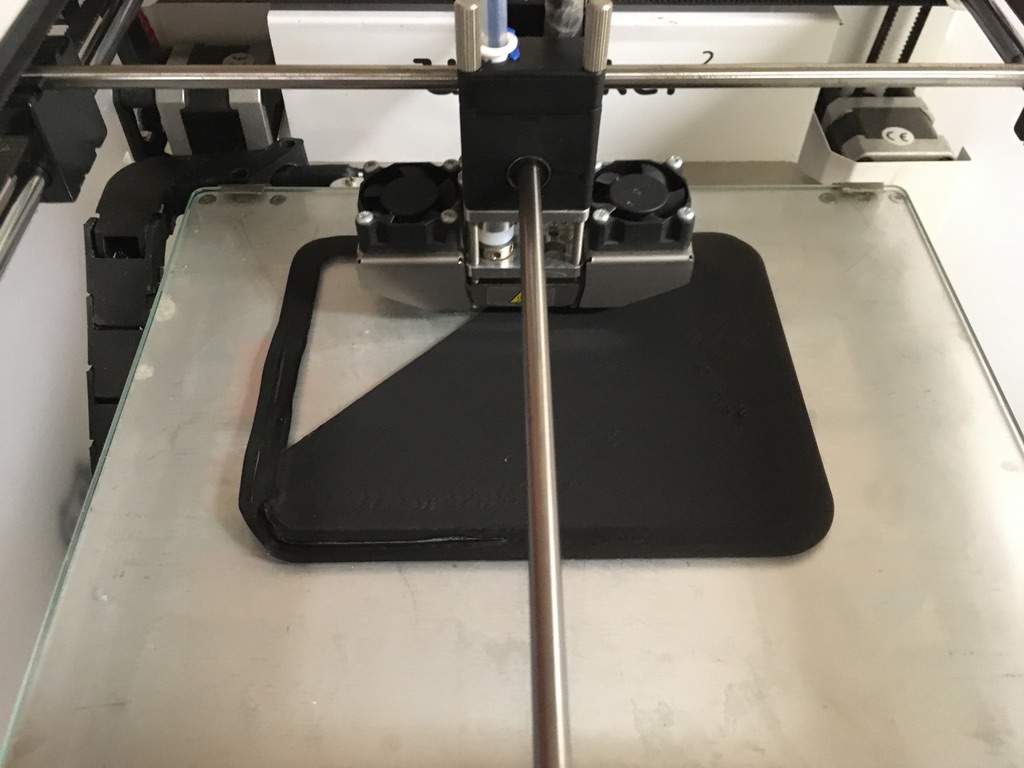
Also, I decided to start a print of a mini waste-basked for the Model 3. Unfortunately, this print stopped in the middle of the print for no apparent reason, so I will need to restart that. As you can see, I had a bit of an adhesion problem, but that seems not to have been a real issue.
Finally, the community service of the day was to add another instructional note about the vaccum tube to the chip evacuator container. Unfortunately, it still seems we are not all the way there with the chip evacuator, because someone apparently failed once more.
