
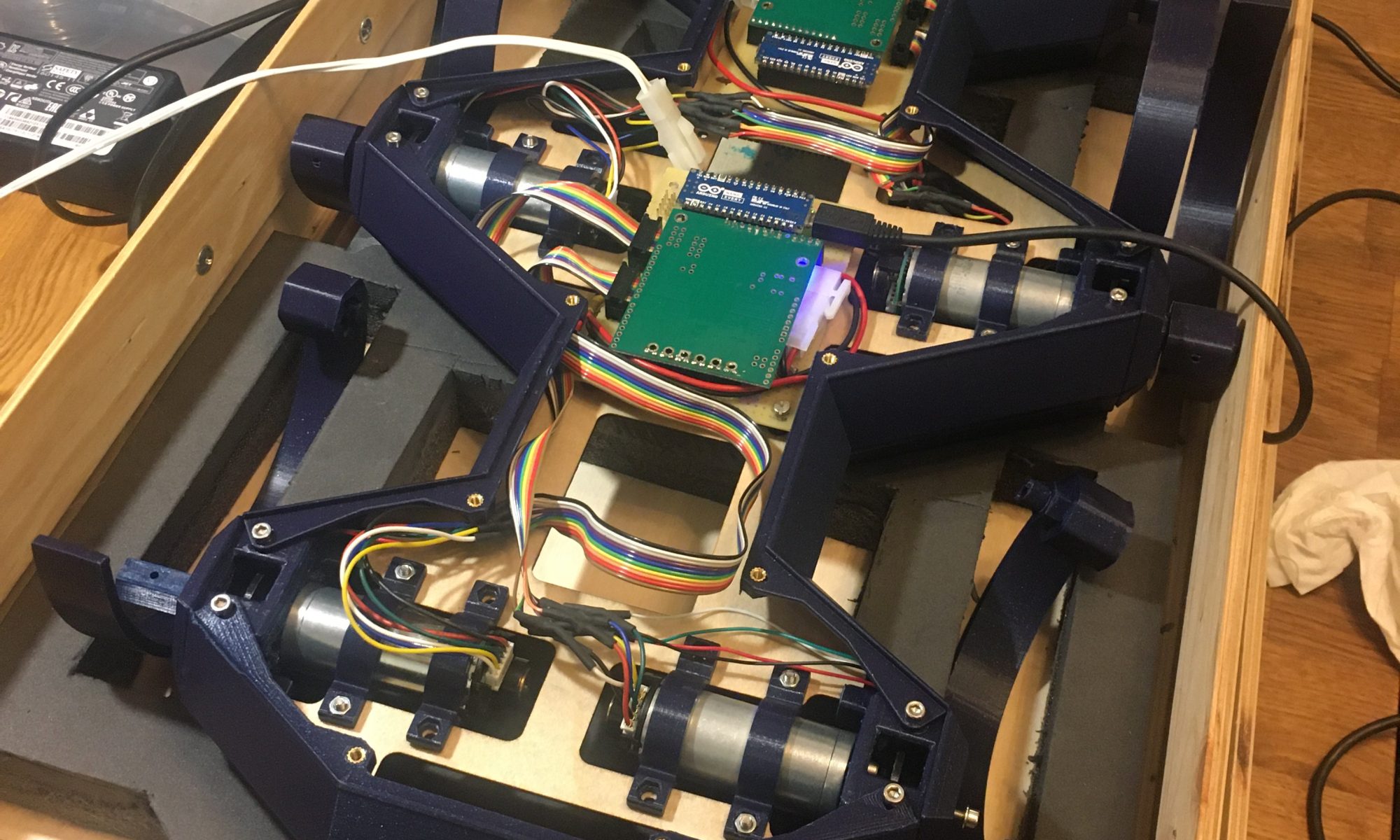
So all three driver boards are now completely wired and tested for dual motor control. One Arduino gave up and let out the magic smoke, for no apparent reason. Lucklily, I had bought a spare right from the start, so that was no issue.
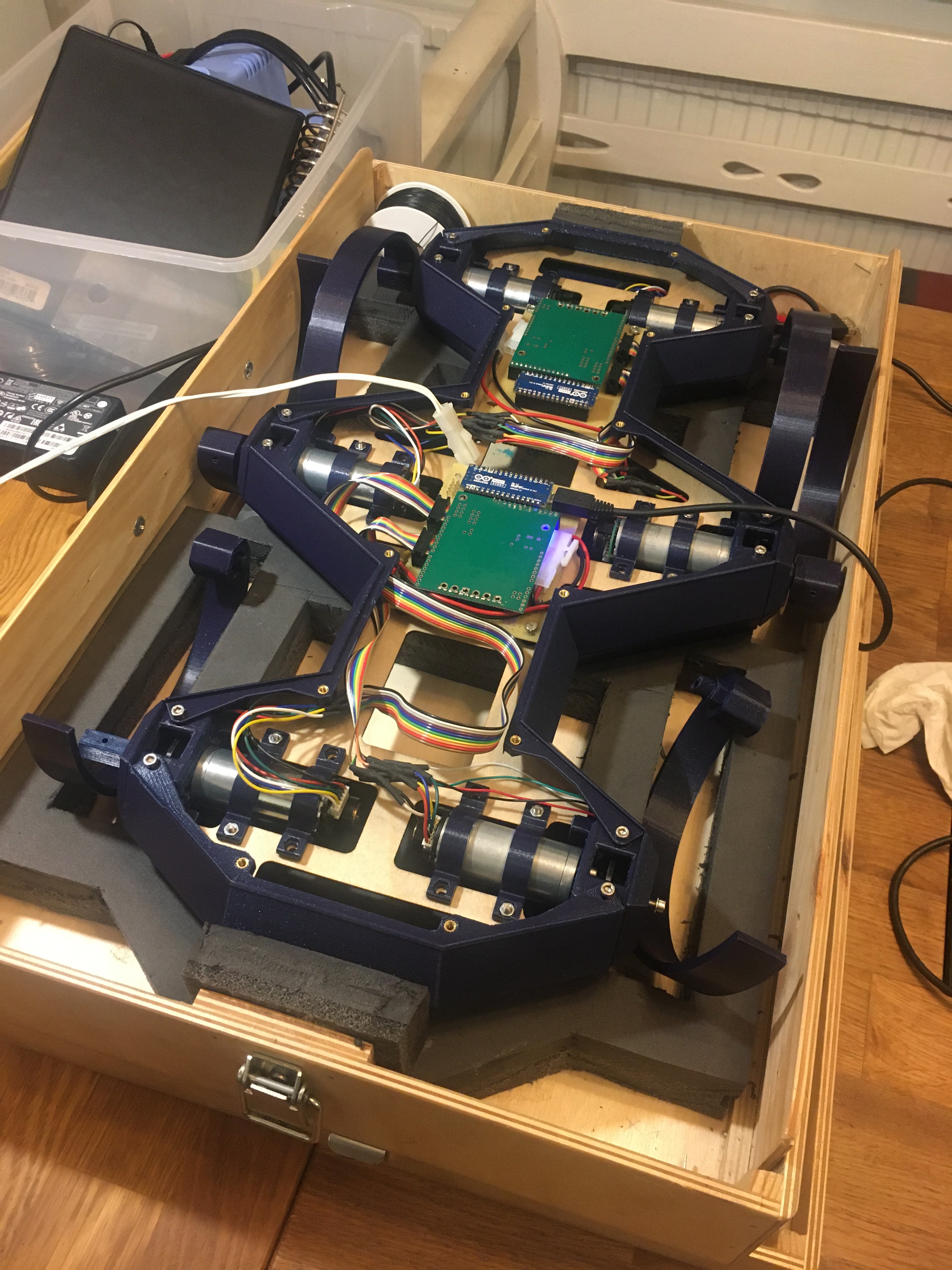
I also finished the foam inlay so the robot is now supported from all sides, lid included. But I also cut out all of the foam that wasn’t doing any work so I have some space for other stuff that I want to pack along.
The driver boards are not fixed properly as I am missing a few screws of the proper length. These are ordered and should appear soon. I have also ordered an angled USB cable to be able to program the Arduinos even then they are mounted in the proper position. Until then, I have placed one of the driver boards where the batteries will go in the future to get access to the USB port.
With this, the list of things to do has shrunk down rather drastically:
- Add some rubber grip to the legs.
- Wire up the I2C bus and mount a controller Raspberry Pi (Need to order that as well).
- Make the leg-controller code more robust.
- Fine-tune the leg movement regulators to give even smoother movement.
- Program the gait-controll
- Done!