So I wrapped the entire driver board, and it worked perfectly on the first test. So now I have a board with three dual-driver cards that can power and controll a total of 6 motors complete with all of their detectors.
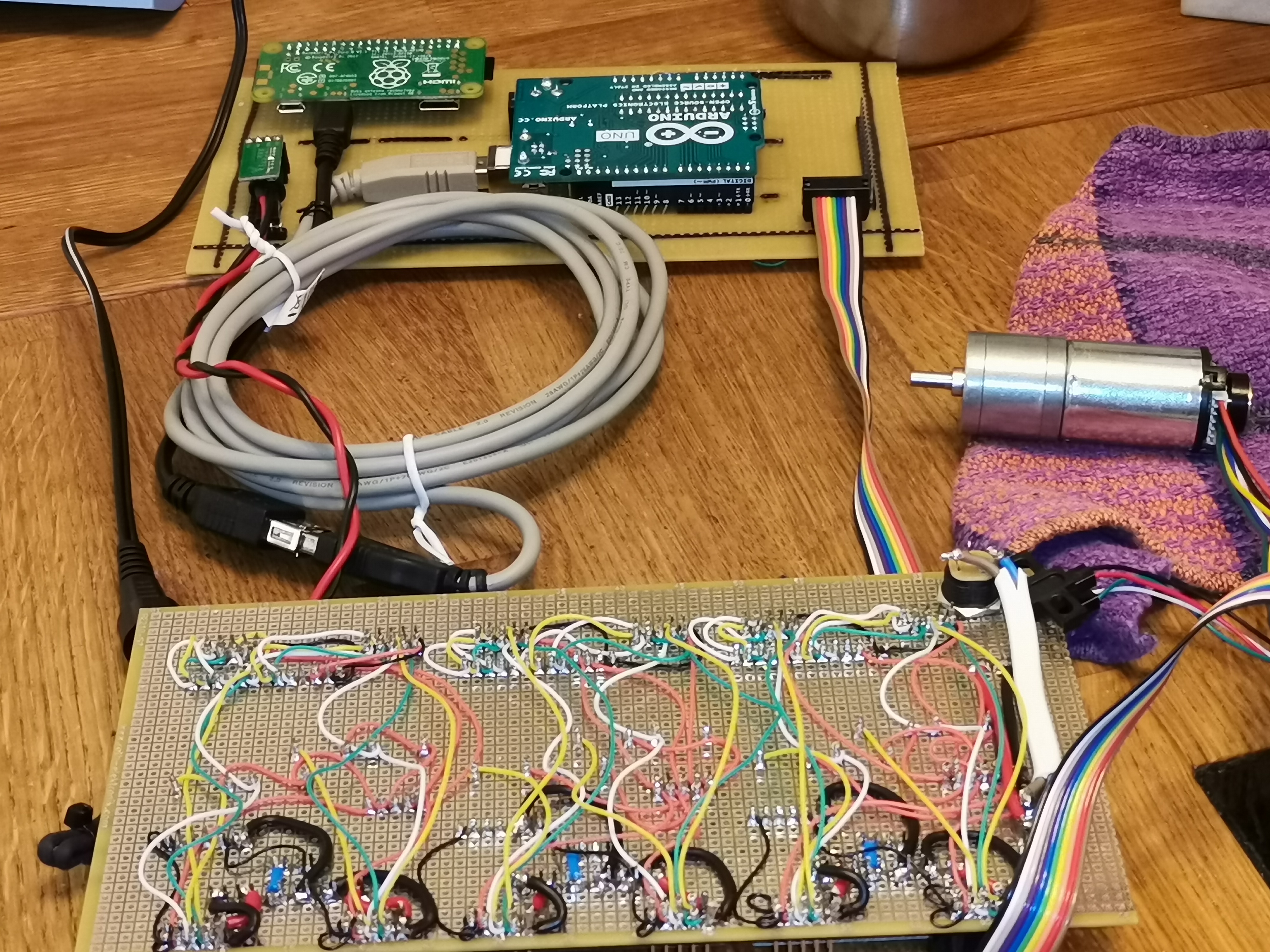
Also, I don’t think I have uploaded a picture of the entire development setup. In the foreground, you see the backside of the powerboard with all of its wires. In the background, you see another board with two mini-computers on it. One is an Arduino that I use for the real-time stuff. Here you see an Uno mounted, which does not have enough pins to control all of the 6 motors (7 pins per motor means 42 pins, of which 6 analog-in and 6 PWM). So the plan is to place my Due there to be able to controll all motors at the same time.
But the real nice detail is the tiny little Raspberry Pi Zero W you see furthest away. In that super-tiny board is a completre computer, including Wifi. So I simply installed my development environment on there. As soon as it coot sup, it connects to my home WiFi and I can just telnet in and continue where I left off. No need to maintain a dev environment on my laptops (I have 2). Everythingis just there, guaranteed to be perfectly compatible.