
So to build a robot, you need to design a robot. Since RHex was designed by universities (Using military money, of course), you can actually find documentation.. Not great documentation, but still: https://kodlab.seas.upenn.edu/uploads/Main/xrhextechreport.pdf
So the original weighs in at something like 10kg and cost like a small car. I decided to aim for a 2.5kg machine. So what sort of motor would I need? Top-of-the line brushless DC motors are out of my budget range, but six of these solid little ones would give me a pretty good kick. This would give me about 10kg (98N) of max upward force. For a 2.5kg robot that leads to a vertical acceleration of about 3g when all legs are pushing at the same time.
These motors come with an encoder built-in which is convenient: https://www.pololu.com/product/4846
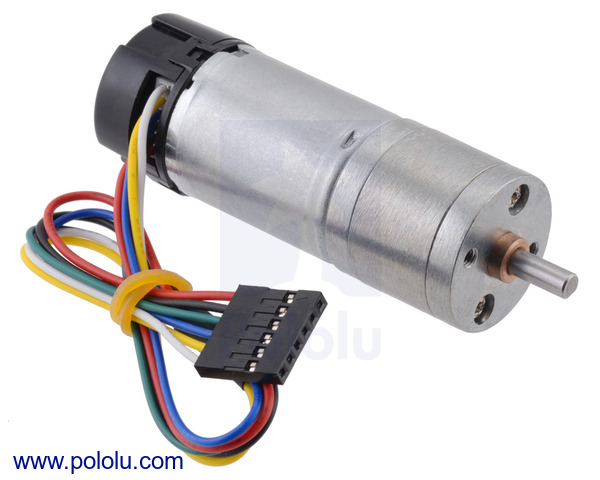
To drive them, this little driver with 5A peak should be able to keep up, I hope: https://www.pololu.com/product/1212

Below is the design for the metal frame and the motors in place. The red little pieces fit a ball bearing for stability and an optobreaker to be able to calibrate absolute position of the legs. The space between the motors should fit the DC motor drivers, an Arduino Mega and enough batteries to power the entire thing.
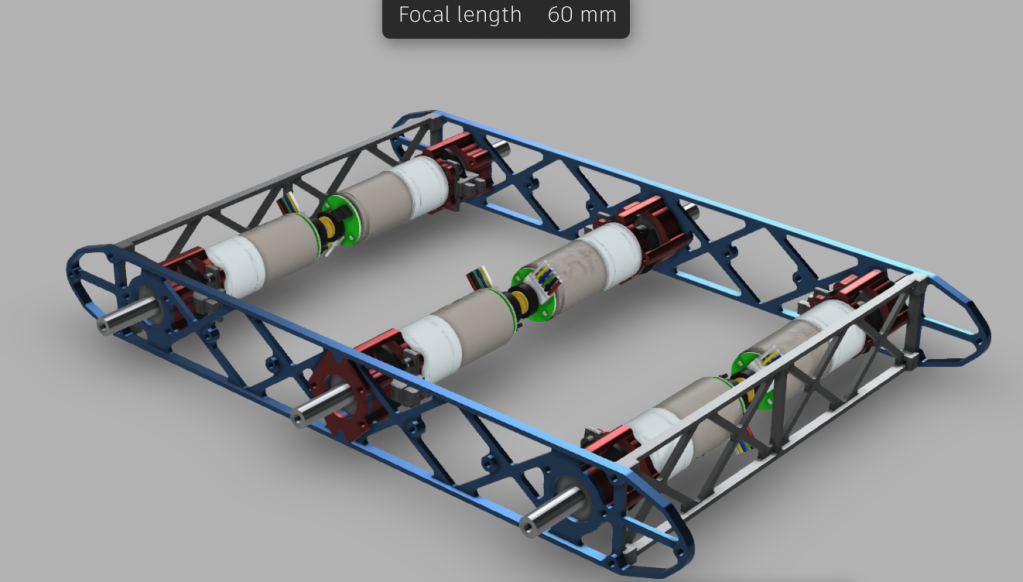
Use this link to download the model for Fusion 360: https://a360.co/2NWdxsP